TARAD: Task-Aware Robot Affordance-Centric Diffusion Policy Learned From LLM-Generated Demonstrations
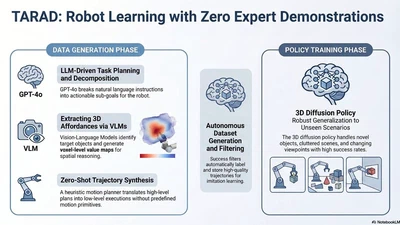
タスクを意識したロボットアフォーダンス中心の拡散ポリシーを提案。ロボットのマニピュレーションタスクにおいて、アフォーダンスの概念を拡散モデルに統合することで、より適応的な行動生成を実現した。
タスクを意識したロボットアフォーダンス中心の拡散ポリシーを提案。ロボットのマニピュレーションタスクにおいて、アフォーダンスの概念を拡散モデルに統合することで、より適応的な行動生成を実現した。
模倣学習、強化学習、大規模言語モデル(LLM)を活用したロボットの自律的な行動計画・動作生成に関する研究。LLMと線形計画法を組み合わせたマルチロボットタスクプランニング(LiP-LLM)、アフォーダンスに基づく拡散ポリシー(TARAD)、ヒューマノイドロコモーション(LocoGPT)など、最先端の手法を開発している。