LiP-LLM: Integrating Linear Programming and Dependency Graph With LLMs for Multi-Robot Task Planning
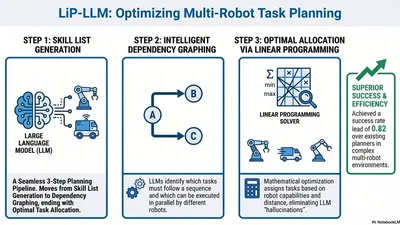
大規模言語モデル(LLM)と線形計画法・依存グラフを統合した、マルチロボットタスクプランニング手法を提案。LLMの自然言語理解能力と最適化手法を組み合わせることで、複雑なマルチロボット協調タスクの効率的な計画生成を実現した。
大規模言語モデル(LLM)と線形計画法・依存グラフを統合した、マルチロボットタスクプランニング手法を提案。LLMの自然言語理解能力と最適化手法を組み合わせることで、複雑なマルチロボット協調タスクの効率的な計画生成を実現した。