TARAD: Task-Aware Robot Affordance-Centric Diffusion Policy Learned From LLM-Generated Demonstrations
2025年10月1日· ·
0 分で読める
·
0 分で読める
堀井隆斗
著者
Site Hu, Takayuki Nagai, Takato Horii
概要
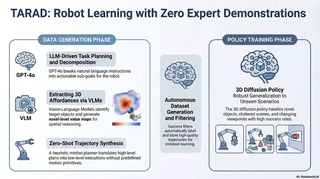
タスクを意識したロボットアフォーダンス中心の拡散ポリシーを提案。ロボットのマニピュレーションタスクにおいて、アフォーダンスの概念を拡散モデルに統合することで、より適応的な行動生成を実現した。
タイプ
論文誌
IEEE Robotics and Automation Letters, 10(10)

著者
堀井隆斗
(he/him)
准教授
大阪大学大学院基礎工学研究科 准教授。
認知発達・記号創発ロボティクス、感情発達の計算論的モデリング、
ロボット学習、ヒューマンロボットインタラクションを専門とする。