LiP-LLM: Integrating Linear Programming and Dependency Graph With LLMs for Multi-Robot Task Planning
2025年2月1日· ·
0 分で読める
·
0 分で読める
堀井隆斗
著者
Kazuma Obata, Tatsuya Aoki, Takato Horii, Tadahiro Taniguchi, Takayuki Nagai
概要
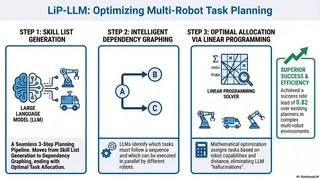
大規模言語モデル(LLM)と線形計画法・依存グラフを統合した、マルチロボットタスクプランニング手法を提案。LLMの自然言語理解能力と最適化手法を組み合わせることで、複雑なマルチロボット協調タスクの効率的な計画生成を実現した。
タイプ
論文誌
IEEE Robotics and Automation Letters, 10(2), 1122-1129

著者
堀井隆斗
(he/him)
准教授
大阪大学大学院基礎工学研究科 准教授。
認知発達・記号創発ロボティクス、感情発達の計算論的モデリング、
ロボット学習、ヒューマンロボットインタラクションを専門とする。