LocoGPT: GPT-Based Multi-Humanoid-Task Policy for Humanoid Locomotion
GPTベースのマルチヒューマノイドタスクポリシーを用いたヒューマノイドロコモーション手法。大規模言語モデルの汎用的な推論能力を活用し、多様な歩行タスクに対応する統一的なポリシーを実現した。
GPTベースのマルチヒューマノイドタスクポリシーを用いたヒューマノイドロコモーション手法。大規模言語モデルの汎用的な推論能力を活用し、多様な歩行タスクに対応する統一的なポリシーを実現した。
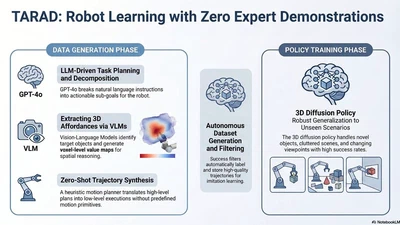
タスクを意識したロボットアフォーダンス中心の拡散ポリシーを提案。ロボットのマニピュレーションタスクにおいて、アフォーダンスの概念を拡散モデルに統合することで、より適応的な行動生成を実現した。
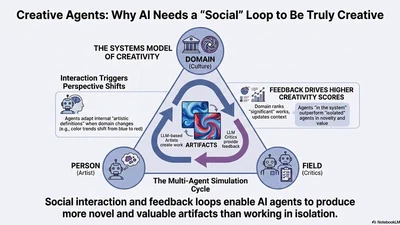
生成エージェントを用いて創造性のシステムモデルをシミュレーションする研究。人間の創造的プロセスを計算論的に再現し、創造性がどのように発現するかを探究した。
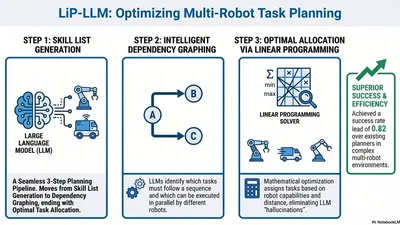
大規模言語モデル(LLM)と線形計画法・依存グラフを統合した、マルチロボットタスクプランニング手法を提案。LLMの自然言語理解能力と最適化手法を組み合わせることで、複雑なマルチロボット協調タスクの効率的な計画生成を実現した。
深層ニューラルネットワーク、強化学習、大規模言語モデルを用いたデータ駆動型動作計画に関する包括的サーベイ論文。ロボットの動作計画における最新手法を体系的に整理し、今後の研究方向性を示した。
自律ロボットの信頼性向上を目指した説明生成フレームワークの提案。ロボットの意思決定プロセスを人間にわかりやすく説明することで、人間とロボットの信頼関係を構築するアプローチを開発した。
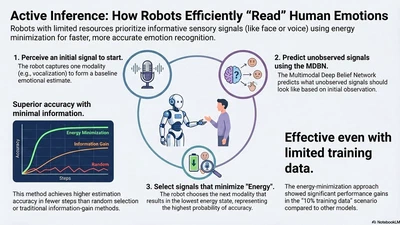
能動的推論のフレームワークに基づき、マルチモーダルな情動的ヒューマンロボットインタラクションにおけるエネルギー最小化アプローチを提案。ロボットが感情的な信号を能動的に推論・応答するメカニズムを実現した。
本研究では、マルチモーダル知覚(視覚・聴覚・触覚)を通じた感情知覚の発達を、触覚優位性と知覚改善のメカニズムによりモデル化した。乳児の感情発達過程を計算論的に再現し、触覚が感情知覚の発達を導く役割を持つことを示した。