

YouTube公開:対談バトル「感情はロボットに実装できるのか?【堀井隆斗 vs スズキ】」
YouTubeにて、対談バトル「感情はロボットに実装できるのか?【堀井隆斗 vs スズキ】」が公開されました。CPC Camp 2026(集合的予測符号化と記号創発システムに関する春の研究合宿2026)で収録された「記号創発クロストーク」番外編です。 「ロボットは感情をもてると思いますか?」研究者によるガチ対談です。
•
1 分で読める
博士(工学)
2013-04-01
2017-09-30
大阪大学大学院 工学研究科 知能・機能創成工学専攻
修士(工学)
2011-04-01
2013-03-31
大阪大学大学院 工学研究科 知能・機能創成工学専攻
学士(工学)
2009-04-01
2011-03-31
豊田工業高等専門学校 専攻科 電子機械工学専攻
ロボットは感情をもつことができるのか?人間の心はどのように発達するのか?
私たちの研究グループでは、認知発達ロボティクスや記号創発ロボティクスの観点から、人間の感情発達の計算論的モデリング、能動的推論に基づくヒューマンロボットインタラクション、クオリア構造と情報構造の対応関係の解明、そして創造性のモデリングに取り組んでいます。さらに、模倣学習や強化学習による行動獲得、大規模言語モデル(LLM)や視覚言語モデル(VLM)といった基盤モデルを活用したロボットの行動計画とタスク遂行、マルチモーダル情報の統合に基づく身体性を伴った知能の構築など、ロボット学習を軸に知能の本質に迫る多角的な研究を展開しています。
YouTubeにて、対談バトル「感情はロボットに実装できるのか?【堀井隆斗 vs スズキ】」が公開されました。CPC Camp 2026(集合的予測符号化と記号創発システムに関する春の研究合宿2026)で収録された「記号創発クロストーク」番外編です。 「ロボットは感情をもてると思いますか?」研究者によるガチ対談です。

第21回日本感性工学会春季大会(2026年3月16日〜18日、宇都宮大学陽東キャンパス)にて、中村萌さん(ポーラ化成工業株式会社/2026年4月より社会人博士課程D1として研究室に在籍)が優秀発表賞を受賞しました。 発表タイトル:「自由記述データに基づく触覚印象と物理的特徴の対照学習-触りごこちを伝える「自由なことば」を設計につなぐ」 著者:中村萌、野村健太 …

集合的予測符号化と記号創発システムに関する春の研究合宿「CPC Spring Camp 2026」(2026年3月21日〜26日)にて、研究室の野村健太郎さん(M2)がMVPに選ばれました。
ロボットは感情クオリアをもつことができるのか?この問いに対し、クオリア構造と情報構造の対応関係の解明に取り組んでいる。学術変革領域研究(A)「クオリア構造」プロジェクトに参画し、主観的体験の神経回路モデルや確率的生成モデルによるフレームワークの構築を進めている。東京大学IRCNとの共同研究も展開中。
社会的文脈における対話ロボット、メンタルヘルス支援、コミュニケーション支援など、人とロボットの共生を目指すインタラクション研究。触覚を介した情動的コミュニケーション、ロボットの意思決定の透明性を確保するためのグラフ構造世界モデルに基づく説明生成フレームワークなどに取り組んでいる。社会ロボット学グループ(吉川研究室)の一員として研究を推進。
模倣学習、強化学習、大規模言語モデル(LLM)を活用したロボットの自律的な行動計画・動作生成に関する研究。LLMと線形計画法を組み合わせたマルチロボットタスクプランニング(LiP-LLM)、アフォーダンスに基づく拡散ポリシー(TARAD)、ヒューマノイドロコモーション(LocoGPT)など、最先端の手法を開発している。
自己を写す「Self Mirroring Twins」との共棲を通じて、行動変容と主体的な社会創成を支えるAI基盤を構築する JST CREST プロジェクト。
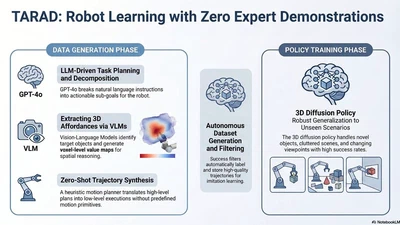
タスクを意識したロボットアフォーダンス中心の拡散ポリシーを提案。ロボットのマニピュレーションタスクにおいて、アフォーダンスの概念を拡散モデルに統合することで、より適応的な行動生成を実現した。
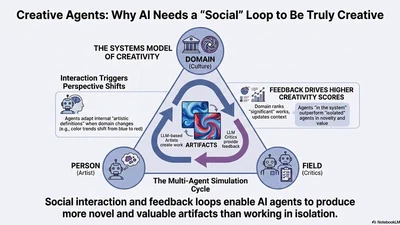
生成エージェントを用いて創造性のシステムモデルをシミュレーションする研究。人間の創造的プロセスを計算論的に再現し、創造性がどのように発現するかを探究した。
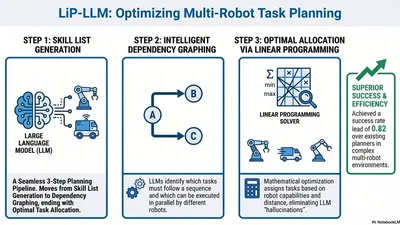
大規模言語モデル(LLM)と線形計画法・依存グラフを統合した、マルチロボットタスクプランニング手法を提案。LLMの自然言語理解能力と最適化手法を組み合わせることで、複雑なマルチロボット協調タスクの効率的な計画生成を実現した。
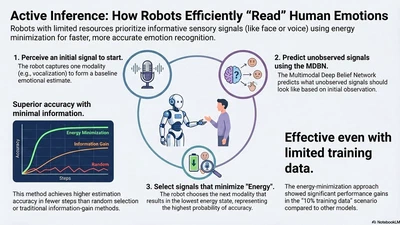
能動的推論のフレームワークに基づき、マルチモーダルな情動的ヒューマンロボットインタラクションにおけるエネルギー最小化アプローチを提案。ロボットが感情的な信号を能動的に推論・応答するメカニズムを実現した。